Matrixnormen. Konsistenz und Unterordnung von Normen
Enzyklopädisches YouTube
1 / 1
✪ Vektornorm. Teil 4
Untertitel
Definition
Sei K das Hauptfeld (normalerweise K = R oder K = C ) und ist der lineare Raum aller Matrizen mit m Zeilen und n Spalten, die aus Elementen von K bestehen. Eine Norm ist für den Raum von Matrizen gegeben, wenn jeder Matrix eine nicht negative reelle Zahl zugeordnet ist ‖ A ‖ (\displaystyle \|A\|), genannt seine Norm, so dass
Bei quadratischen Matrizen (z. m = n) können Matrizen multipliziert werden, ohne den Raum zu verlassen, und daher erfüllen die Normen in diesen Räumen normalerweise auch die Eigenschaft Submultiplikativität :
Die Submultiplikativität kann auch für die Normen nicht quadratischer Matrizen durchgeführt werden, jedoch für mehrere erforderliche Größen gleichzeitig definiert werden. Nämlich, wenn A eine Matrix ist ℓ × m, und B ist die Matrix m × n, dann A B-Matrix ℓ × n .
Betreibernormen
Eine wichtige Klasse von Matrixnormen sind Betreibernormen, auch bezeichnet als Untergeordnete oder induziert . Die Operatornorm ist eindeutig gemäß den beiden in und definierten Normen konstruiert, basierend auf der Tatsache, dass jede Matrix m × n wird durch einen linearen Operator aus dargestellt K.n (\displaystyle K^(n)) in Km (\displaystyle K^(m)). Speziell,
‖ A ‖ = sup ( ‖ A x ‖ : x ∈ K n , ‖ x ‖ = 1 ) = sup ( ‖ A x ‖ ‖ x ‖ : x ∈ K n , x ≠ 0 ) . (\displaystyle (\begin(aligned)\|A\|&=\sup\(\|Ax\|:x\in K^(n),\ \|x\|=1\)\\&=\ sup \left\((\frac (\|Ax\|)(\|x\|)):x\in K^(n),\ x\neq 0\right\).\end(aligned)))Unter der Bedingung, dass Normen auf Vektorräumen konsistent spezifiziert sind, ist eine solche Norm submultiplikativ (siehe ).
Beispiele für Betreibernormen
Eigenschaften der Spektralnorm:
- Die Spektralnorm eines Operators ist gleich dem maximalen singulären Wert dieses Operators.
- Die Spektralnorm eines normalen Operators ist gleich dem absoluten Wert des maximalen Modulo-Eigenwerts dieses Operators.
- Die Spektralnorm ändert sich nicht, wenn eine Matrix mit einer orthogonalen (einheitlichen) Matrix multipliziert wird.
Nicht-Operator-Normen von Matrizen
Es gibt Matrixnormen, die keine Operatornormen sind. Das Konzept der Nichtoperatornormen von Matrizen wurde von Yu. I. Lyubich eingeführt und von G. R. Belitsky untersucht.
Ein Beispiel für eine Nicht-Operator-Norm
Betrachten Sie beispielsweise zwei verschiedene Operatornormen ‖ A ‖ 1 (\displaystyle \|A\|_(1)) und ‖ A ‖ 2 (\displaystyle \|A\|_(2)), wie Zeilen- und Spaltennormen. Bildung einer neuen Norm ‖ A ‖ = m a x (‖ A ‖ 1 , ‖ A ‖ 2) (\displaystyle \|A\|=max(\|A\|_(1),\|A\|_(2))). Die neue Norm hat eine ringförmige Eigenschaft ‖ A B ‖ ≤ ‖ A ‖ ‖ B ‖ (\displaystyle \|AB\|\leq \|A\|\|B\|), bewahrt die Einheit ‖ I ‖ = 1 (\displaystyle \|I\|=1) und ist kein Operator .
Beispiele für Normen
Vektor p (\ displaystyle p)-Norm
Kann in Erwägung gezogen werden m × n (\displaystyle m\times n) Matrix als Größenvektor mn (\displaystyle mn) und verwenden Sie Standardvektornormen:
‖ EIN ‖ p = ‖ v e c (A) ‖ p = (∑ ich = 1 m ∑ j = 1 n | a ich j | p) 1 / p (\displaystyle \|A\|_(p)=\|\mathrm ( vec) (A)\|_(p)=\left(\sum _(i=1)^(m)\sum _(j=1)^(n)|a_(ij)|^(p)\ rechts)^(1/p))Frobenius-Norm
Frobenius-Norm, oder euklidische Norm ist ein Sonderfall der p-Norm für p = 2 : ‖ EIN ‖ F = ∑ ich = 1 m ∑ j = 1 n ein ich j 2 (\displaystyle \|A\|_(F)=(\sqrt (\sum _(i=1)^(m)\sum _(j =1)^(n)a_(ij)^(2)))).
Die Frobenius-Norm ist einfach zu berechnen (im Vergleich beispielsweise zur Spektralnorm). Es hat die folgenden Eigenschaften:
‖ A x ‖ 2 2 = ∑ ich = 1 m | ∑ j = 1 n ein ich j x j | 2 ≤ ∑ ich = 1 m (∑ j = 1 n | a ich j | 2 ∑ j = 1 n | x j | 2) = ∑ j = 1 n | x j | 2 ‖ EIN ‖ F 2 = ‖ EIN ‖ F 2 ‖ x ‖ 2 2 . (\displaystyle \|Ax\|_(2)^(2)=\sum _(i=1)^(m)\left|\sum _(j=1)^(n)a_(ij)x_( j)\right|^(2)\leq \sum _(i=1)^(m)\left(\sum _(j=1)^(n)|a_(ij)|^(2)\sum _(j=1)^(n)|x_(j)|^(2)\right)=\sum _(j=1)^(n)|x_(j)|^(2)\|A\ |_(F)^(2)=\|A\|_(F)^(2)\|x\|_(2)^(2).)- Submultiplikativität: ‖ A B ‖ F ≤ ‖ A ‖ F ‖ B ‖ F (\displaystyle \|AB\|_(F)\leq \|A\|_(F)\|B\|_(F)), als ‖ EIN B ‖ F 2 = ∑ ich , j | ∑ k ein ich k b k j | 2 ≤ ∑ ich , j (∑ k | ein ich k | | b k j |) 2 ≤ ∑ ich , j (∑ k | ein ich k | 2 ∑ k | b k j | 2) = ∑ ich , k | ein ich k | 2 ∑ k , j | b k j | 2 = ‖ A ‖ F 2 ‖ B ‖ F 2 (\displaystyle \|AB\|_(F)^(2)=\sum _(i,j)\left|\sum _(k)a_(ik) b_(kj)\right|^(2)\leq \sum _(i,j)\left(\sum _(k)|a_(ik)||b_(kj)|\right)^(2)\ leq \sum _(i,j)\left(\sum _(k)|a_(ik)|^(2)\sum _(k)|b_(kj)|^(2)\right)=\sum _(i,k)|a_(ik)|^(2)\sum _(k,j)|b_(kj)|^(2)=\|A\|_(F)^(2)\| B\|_(F)^(2)).
- ‖ EIN ‖ F 2 = t r EIN ∗ EIN = t r EIN EIN ∗ (\displaystyle \|A\|_(F)^(2)=\mathop (\rm (tr)) EIN^(*)A=\ mathop (\rm (tr)) AA^(*)), wo t r EIN (\ displaystyle \ mathop (\ rm (tr)) EIN)- Matrixspur A (\displaystyle A), A ∗ (\displaystyle A^(*)) ist eine hermitesch konjugierte Matrix .
- ‖ A ‖ F 2 = ρ 1 2 + ρ 2 2 + ⋯ + ρ n 2 (\displaystyle \|A\|_(F)^(2)=\rho _(1)^(2)+\rho _ (2)^(2)+\dots+\rho_(n)^(2)), wo ρ 1 , ρ 2 , … , ρ n (\displaystyle \rho _(1),\rho _(2),\dots ,\rho _(n))- Einzelwerte der Matrix A (\displaystyle A).
- ‖ A ‖ F (\displaystyle \|A\|_(F))ändert sich nicht, wenn eine Matrix multipliziert wird A (\displaystyle A) links oder rechts auf orthogonale (einheitliche) Matrizen.
Modul maximal
Die Maximalmodulnorm ist ein weiterer Sonderfall der p-Norm für p = ∞ .
‖ EIN ‖ max = max ( | a i j | ) . (\displaystyle \|A\|_(\text(max))=\max\(|a_(ij)|\).)Norm Schatten
Konsistenz von Matrix- und Vektornormen
Matrixnorm ‖ ⋅ ‖ a b (\displaystyle \|\cdot \|_(ab)) auf der Km × n (\displaystyle K^(m\times n)) genannt einverstanden mit den Normen ‖ ⋅ ‖ a (\displaystyle \|\cdot \|_(a)) auf der K.n (\displaystyle K^(n)) und ‖ ⋅ ‖ b (\displaystyle \|\cdot \|_(b)) auf der Km (\displaystyle K^(m)), wenn:
‖ A x ‖ b ≤ ‖ A ‖ a b ‖ x ‖ a (\displaystyle \|Ax\|_(b)\leq \|A\|_(ab)\|x\|_(a))für alle A ∈ K m × n , x ∈ K n (\displaystyle A\in K^(m\times n),x\in K^(n)). Konstruktionsbedingt stimmt die Operatornorm mit der ursprünglichen Vektornorm überein.
Beispiele für konsistente, aber nicht untergeordnete Matrixnormen:
Gleichwertigkeit von Normen
Alle Normen im Weltraum Km × n (\displaystyle K^(m\times n)) sind äquivalent, d. h. für zwei beliebige Normen ‖ . α (\displaystyle \|.\|_(\alpha )) und ‖ . ‖ β (\displaystyle \|.\|_(\beta )) und für jede Matrix A ∈ K m × n (\displaystyle A\in K^(m\times n)) doppelte Ungleichheit ist wahr.
» Lektion 12. Matrixrang. Matrix-Rang-Berechnung. Matrixnorm
Lektion Nummer 12. Matrix-Rang. Matrix-Rang-Berechnung. Matrixnorm.
Wenn alle MatrixminorenEINbestellenkgleich Null sind, dann sind alle Minoren der Ordnung k + 1, sofern vorhanden, ebenfalls gleich Null.
Matrix-Rang EIN
ist die größte Ordnung der Minoren der Matrix EIN
, außer Null.
Der maximale Rang kann gleich der minimalen Anzahl der Zeilen oder Spalten der Matrix sein, d.h. Wenn die Matrix eine Größe von 4x5 hat, ist der maximale Rang 4.
Der Mindestrang einer Matrix ist 1, es sei denn, es handelt sich um eine Nullmatrix, bei der der Rang immer null ist.
Der Rang einer nicht entarteten quadratischen Matrix der Ordnung n ist gleich n, da ihre Determinante ein Minor der Ordnung n ist und die nicht entartete Matrix ungleich Null ist.
Das Transponieren einer Matrix ändert ihren Rang nicht.
Der Rang der Matrix sei . Dann wird jeder Minor der Ordnung außer Null aufgerufen grundlegendes Moll.
Beispiel. Gegeben sei eine Matrix A. 
Die Matrixdeterminante ist Null.
Moll zweiter Ordnung ![]() . Daher ist r(A)=2 und der Moll ist basisch.
. Daher ist r(A)=2 und der Moll ist basisch.
Ein einfaches Nebenfach ist auch ein Nebenfach ![]() .
.
Unerheblich ![]() , Weil =0, also wird es nicht einfach sein.
, Weil =0, also wird es nicht einfach sein.
Übung: Unabhängig prüfen, welche anderen Minderjährigen zweiter Ordnung basisch sind und welche nicht.
Das Ermitteln des Rangs einer Matrix durch Berechnen aller ihrer untergeordneten Werte erfordert zu viel Rechenarbeit. (Der Leser kann verifizieren, dass es in einer quadratischen Matrix vierter Ordnung 36 Nebenwerte zweiter Ordnung gibt.) Daher wird ein anderer Algorithmus verwendet, um den Rang zu finden. Um es zu beschreiben, sind einige zusätzliche Informationen erforderlich.
Wir nennen die folgenden Operationen auf ihnen elementare Transformationen von Matrizen:
1) Permutation von Zeilen oder Spalten;
2) Multiplizieren einer Reihe oder Spalte mit einer Zahl ungleich Null;
3) Hinzufügen einer weiteren Zeile zu einer der Zeilen, multipliziert mit einer Zahl, oder Hinzufügen zu einer der Spalten einer anderen Spalte, multipliziert mit einer Zahl.
Unter elementaren Transformationen ändert sich der Rang der Matrix nicht.
Algorithmus zur Berechnung des Rangs einer Matrixähnelt dem Detund liegt darin, dass mit Hilfe elementarer Transformationen die Matrix auf eine einfache Form reduziert wird, für die es nicht schwierig ist, den Rang zu finden. Da sich der Rang nicht bei jeder Transformation ändert, finden wir dadurch durch Berechnung des Rangs der transformierten Matrix den Rang der ursprünglichen Matrix.
Es sei erforderlich, den Rang der Dimensionsmatrix zu berechnen mxn.
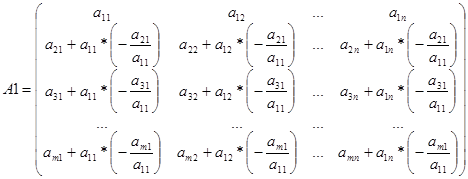
Als Ergebnis von Berechnungen hat die Matrix A1 die Form 

Wenn alle Zeilen, beginnend mit der dritten, Null sind, dann ![]() , da minderjährig
, da minderjährig ![]() . Andernfalls erreichen wir durch Permutieren von Zeilen und Spalten mit Zahlen größer als zwei, dass das dritte Element der dritten Zeile von Null verschieden ist. Wenn wir außerdem die dritte Zeile, multipliziert mit den entsprechenden Zahlen, zu den Zeilen mit großen Zahlen hinzufügen, erhalten wir Nullen in der dritten Spalte, beginnend mit dem vierten Element, und so weiter.
. Andernfalls erreichen wir durch Permutieren von Zeilen und Spalten mit Zahlen größer als zwei, dass das dritte Element der dritten Zeile von Null verschieden ist. Wenn wir außerdem die dritte Zeile, multipliziert mit den entsprechenden Zahlen, zu den Zeilen mit großen Zahlen hinzufügen, erhalten wir Nullen in der dritten Spalte, beginnend mit dem vierten Element, und so weiter.
Irgendwann kommen wir zu einer Matrix, in der alle Zeilen, beginnend mit (r + 1) th, gleich Null sind (oder bei 0 fehlen) und der Minor in den ersten Zeilen und ersten Spalten die Determinante eines Dreiecks ist Matrix mit Nicht-Null-Elementen auf der Diagonale . Der Rang einer solchen Matrix ist. Daher ist Rang(A)=r.
Bei dem vorgeschlagenen Algorithmus zum Ermitteln des Rangs einer Matrix müssen alle Berechnungen ohne Rundung durchgeführt werden. Eine beliebig kleine Änderung mindestens eines der Elemente der Zwischenmatrizen kann dazu führen, dass die resultierende Antwort um mehrere Einheiten vom Rang der ursprünglichen Matrix abweicht.
Wenn die Elemente in der ursprünglichen Matrix ganze Zahlen waren, ist es praktisch, Berechnungen ohne Verwendung von Brüchen durchzuführen. Daher ist es ratsam, die Saiten in jeder Phase mit solchen Zahlen zu multiplizieren, dass keine Brüche in den Berechnungen erscheinen.
In Labor und praktischer Arbeit betrachten wir ein Beispiel zum Ermitteln des Rangs einer Matrix.
ALGORITHMUS FINDEN MATRIX-REGELUNGEN
.
Es gibt nur drei Normen der Matrix.
Erste Matrixnorm= das Maximum der Zahlen, die man erhält, wenn man alle Elemente jeder Spalte modulo addiert.
Beispiel: Gegeben sei eine 3x2-Matrix A (Abb. 10). Die erste Spalte enthält Elemente: 8, 3, 8. Alle Elemente sind positiv. Finden wir ihre Summe: 8+3+8=19. Die zweite Spalte enthält die Elemente: 8, -2, -8. Zwei Elemente sind negativ, daher muss beim Addieren dieser Zahlen der Modul dieser Zahlen (dh ohne Minuszeichen) ersetzt werden. Finden wir ihre Summe: 8+2+8=18. Das Maximum dieser beiden Zahlen ist 19. Die erste Norm der Matrix ist also 19.

Abbildung 10.
Zweite Matrixnorm repräsentiert ein Quadratwurzel aus der Summe der Quadrate aller Elemente der Matrix. Und das bedeutet, wir quadrieren alle Elemente der Matrix, addieren dann die resultierenden Werte und ziehen die Quadratwurzel aus dem Ergebnis.
In unserem Fall stellte sich heraus, dass die 2-Norm der Matrix gleich der Quadratwurzel von 269 war. Im Diagramm habe ich grob die Quadratwurzel von 269 gezogen und das Ergebnis war ungefähr 16,401. Obwohl es richtiger ist, die Wurzel nicht zu extrahieren. 
Dritte Normmatrix ist das Maximum der Zahlen, die man erhält, indem man alle Elemente jeder Reihe modulo addiert.
In unserem Beispiel: Die erste Zeile enthält Elemente: 8, 8. Alle Elemente sind positiv. Finden wir ihre Summe: 8+8=16. Die zweite Zeile enthält Elemente: 3, -2. Eines der Elemente ist negativ, also müssen Sie beim Addieren dieser Zahlen den Modul dieser Zahl ersetzen. Finden wir ihre Summe: 3+2=5. Die dritte Zeile enthält die Elemente 8 und -8. Eines der Elemente ist negativ, also müssen Sie beim Addieren dieser Zahlen den Modul dieser Zahl ersetzen. Finden wir ihre Summe: 8+8=16. Das Maximum dieser drei Zahlen ist 16. Die dritte Norm der Matrix ist also 16. 
Zusammengestellt von: Saliy N.A.
Matrixnorm wir nennen die dieser Matrix zugeordnete reelle Zahl ||A|| so dass sie als reelle Zahl jeder Matrix aus dem n-dimensionalen Raum zugeordnet wird und 4 Axiome erfüllt:
1. ||A||³0 und ||A||=0 nur wenn A eine Nullmatrix ist;
2. ||αA||=|α|·||A||, wobei ein R;
3. ||A+B||£||A||+||B||;
4. ||A·B||£||A||·||B||. (Eigenschaft der Multiplikativität)
Die Matrixnorm kann eingeführt werden verschiedene Wege. Matrix A kann als angesehen werden n 2 - dimensionaler Vektor.
Diese Norm wird die euklidische Norm einer Matrix genannt.
Wenn für jede quadratische Matrix A und jeden Vektor x, dessen Dimension gleich der Ordnung der Matrix ist, die Ungleichung ||Ax||£||A||·||x||
dann sagen wir, dass die Norm der Matrix A mit der Norm des Vektors übereinstimmt. Beachten Sie, dass die Norm des Vektors in der letzten Bedingung links ist (Ax ist ein Vektor).
Verschiedene Matrixnormen stimmen mit einer gegebenen Vektornorm überein. Wählen wir den kleinsten unter ihnen aus. So wird es sein
Diese Matrixnorm ist der gegebenen Vektornorm untergeordnet. Die Existenz eines Maximums in diesem Ausdruck folgt aus der Stetigkeit der Norm, da es immer einen Vektor x -> ||x||=1 und ||Ax||=||A|| gibt.
Zeigen wir, dass x dann die Norm N(A) keiner Vektornorm unterliegt. Matrixnormen, die den zuvor eingeführten Vektornormen untergeordnet sind, werden wie folgt ausgedrückt:
1. ||A|| ¥ = |a ij | (Norm-Maximum)
2. ||A|| 1 = |a ij | (Normsumme)
3. ||A|| 2 = , (Spektralnorm)
wobei s 1 der größte Eigenwert der symmetrischen Matrix A¢A ist, die das Produkt der transponierten und der ursprünglichen Matrix ist. Wenn die Matrix A¢A symmetrisch ist, dann sind alle ihre Eigenwerte reell und positiv. Die Zahl l ist ein Eigenwert, und ein von Null verschiedener Vektor x ist ein Eigenvektor der Matrix A (wenn sie durch die Beziehung Ax=lx verknüpft sind). Wenn die Matrix A selbst symmetrisch ist, A¢ = A, dann A¢A = A 2 und dann s 1 = , wobei der Eigenwert der Matrix A mit dem größten Betrag ist, also ist in diesem Fall = .
Matrix-Eigenwerte überschreiten keine der vereinbarten Normen. Durch Normalisierung der die Eigenwerte definierenden Relation erhalten wir ||λx||=||Ax||, |λ|·||x||=||Ax||£||A||·||x||, | λ|£||A||
Da ||A|| 2 £||A|| e , wo die euklidische Norm einfach berechnet werden kann, kann anstelle der spektralen Norm die euklidische Norm der Matrix in Schätzungen verwendet werden.
30. Konditionalität von Gleichungssystemen. Konditionierungsfaktor .
Grad der Konditionalität- Einfluss der Entscheidung auf die Ausgangsdaten. Axt = b: Vektor b Entscheidung entspricht x. Lassen bändert sich um . Dann der Vektor b+ passt zur neuen Lösung x+ : A(x+ ) = b+. Da das System also linear ist Ax+A = b+, dann EIN = ; = ; = ; b = Achse; = dann ; * , wo - relativer Fehler Störungen der Lösung, KonditionierungsfaktorBedingung (A) (wie oft der Fehler der Lösung zunehmen kann) ist die relative Störung des Vektors b. Bedingung (A) = ; cond(A)* Koeffizienteneigenschaften: abhängig von der Wahl der Matrixnorm; Bedingung ( = cond(A); die Multiplikation einer Matrix mit einer Zahl wirkt sich nicht auf den Bedingungsfaktor aus. Je größer der Koeffizient, desto stärker wirkt sich der Fehler in den Anfangsdaten auf die Lösung des SLAE aus. Die Konditionsnummer darf nicht kleiner als 1 sein.
31. Sweep-Methode zum Lösen von Systemen linearer algebraischer Gleichungen.
Oft müssen Systeme gelöst werden, deren Matrizen schwach gefüllt sind, d.h. enthält viele Nicht-Null-Elemente. Die Matrizen solcher Systeme haben normalerweise eine bestimmte Struktur, darunter gibt es Systeme mit Bandstrukturmatrizen, d.h. In ihnen befinden sich Nicht-Null-Elemente auf der Hauptdiagonale und auf mehreren Nebendiagonalen. Um Systeme mit Bandmatrizen zu lösen, kann die Gaußsche Methode in effizientere Methoden umgewandelt werden. Betrachten wir den einfachsten Fall von Bandsystemen, auf die, wie wir später sehen werden, die Lösung von Diskretisierungsproblemen für Randwertprobleme von Differentialgleichungen durch die Methoden der finiten Differenzen, finiten Elemente etc. reduziert wird. Eine Dreidiagonalmatrix ist eine solche Matrix, die nur auf der Hauptdiagonale und daneben Elemente ungleich Null hat:
Die dreidiagonale Matrix aus Nicht-Null-Elementen hat insgesamt (3n-2).
Benennen Sie die Koeffizienten der Matrix um:
Dann kann das System in komponentenweiser Notation wie folgt dargestellt werden:
A ich * x ich-1 + b ich * x ich + c ich * x ich + 1 = d ich , i=1, 2, …, n; (7)
a 1 = 0, c n = 0. (acht)
Die Struktur des Systems geht nur von der Beziehung zwischen benachbarten Unbekannten aus:
x ich \u003d x ich * x ich +1 + h ich (9)
x i -1 = x i -1* x i + h i -1 und ersetzen Sie in (7):
EIN ich (x ich-1* x ich + h ich-1)+ b ich * x ich + c ich * x ich+1 = d ich
(a ich * x ich-1 + b ich)x ich = –c ich * x ich+1 +d ich –a ich * h ich-1
Wenn wir den resultierenden Ausdruck mit der Darstellung (7) vergleichen, erhalten wir:
Die Formeln (10) repräsentieren rekursive Beziehungen zum Berechnen von Sweep-Koeffizienten. Sie erfordern die Angabe von Anfangswerten. Gemäß der ersten Bedingung (8) für i = 1 haben wir eine 1 = 0, was bedeutet
Ferner werden die verbleibenden Sweep-Koeffizienten gemäß den Formeln (10) für i=2,3,…,n berechnet und gespeichert, und für i=n erhalten wir unter Berücksichtigung der zweiten Bedingung (8) x n =0 . Daher ist gemäß Formel (9) x n = h n .
Danach werden nach Formel (9) nacheinander die Unbekannten x n -1 , x n -2 , ..., x 1 gefunden. Diese Stufe der Berechnung wird Rückwärtslauf genannt, während die Berechnung der Sweep-Koeffizienten Vorwärts-Sweep genannt wird.
Für die erfolgreiche Anwendung der Sweep-Methode ist es erforderlich, dass im Berechnungsprozess keine Situationen mit Division durch Null auftreten und bei einer großen Dimensionalität der Systeme keine schnelle Zunahme von Rundungsfehlern auftritt. Wir werden den Lauf nennen Korrekt, wenn der Nenner der Sweep-Koeffizienten (10) nicht verschwindet, und nachhaltig, wenn ½x i ½<1 при всех i=1,2,…, n. Достаточные условия корректности и устойчивости прогонки, которые во многих приложениях выполняются, определяются теоремой.
Satz. Die Koeffizienten a i und c i der Gleichung (7) für i = 2, 3, ..., n-1 seien von Null verschieden und seien
½b ich ½>½a ich ½+½c ich ½ für i=1, 2,..., n. (elf)
Dann ist der durch die Formeln (10), (9) definierte Sweep korrekt und stabil.









